El unico problema con el disparador IR seria en camaras sin modo liveview, lo normal en macrofotografia es bloquear el espejo antes de disparar para evitar esa vibracion al disparar, el disparo con IR no permite usar esta funcion de la camara, pero usandola en modo livewiev ya la activamos a la par que vemos lo que disparamos.
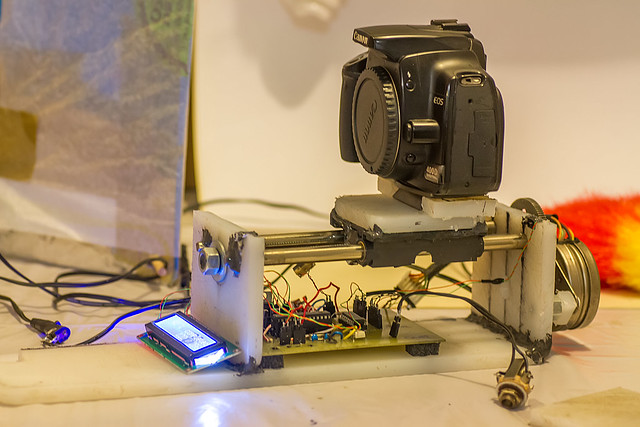
Empezando a disparar con el rail me he dado cuenta de algunos aspectos del diseño que son mejorables. Finalmente voy a poner un par de encoder opticos para poder posicionar el carril donde quiera, no conte al diseñar los largos diferentes de cada lente, extension, etc.
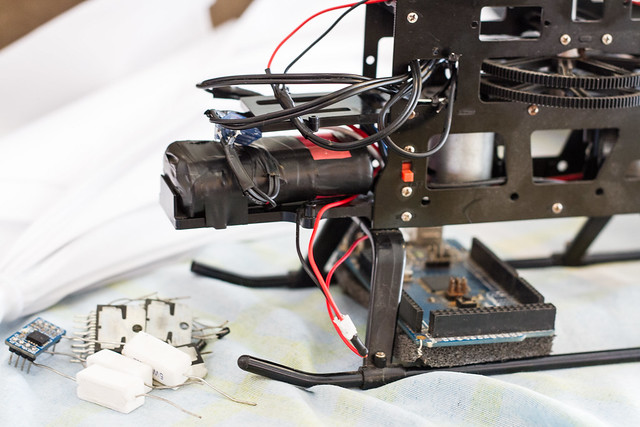
Tambien quiero incluir una extension a la pcb para poder mover 3 motores paso a paso mas para posicionar en los tres ejes la muestra, tambien quiero poder controlar por MOSFET desde arduino el encendido de la iluminacion.
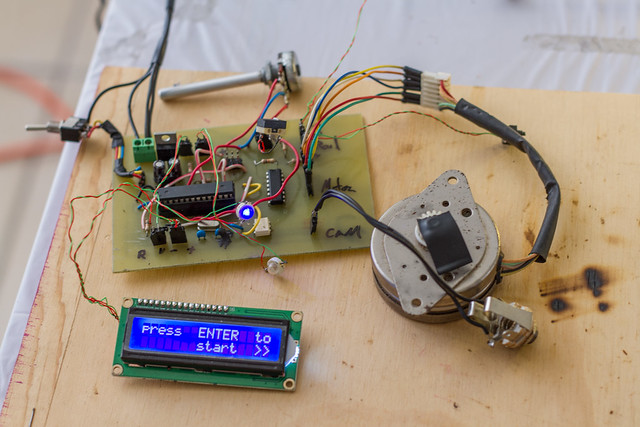
Haciendo las primeras pruebas me he dado cuenta que es un poco incomodo estar doblado colocando la muestra, posicionando el carril, etc. Asi que al rato me acerco por un mando de playstation y se lo implemento al cacharro. Creo que voy a eliminar el potenciometro y el boton que ahora uso de entrada de datos y dejar solo el control.
link con informacion

Primeras fotos, realizadas a f4 en la lente principal (90mm 1:1 tamron dimacro) y f1.8 invertida la segunda lente, un 50mm canon, en una 7D en modo liveview y silent mode1 para evitar vibracion en lo posible.

pila montada en photoshop

pila montana en zerene stacker

pila montada con helicon focus
Como se ve me falta mucho por aprender aun, pero el rail consigue una calidad mas que aceptable. En proximas pruebas voy a usar helicon focus, es muy rapido y facil de usar.