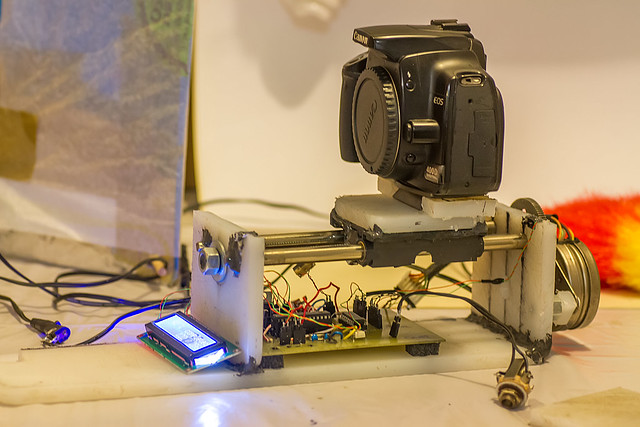
Descargue la sdk de canon y estoy siguiendo este tutorial para implementarlo. La idea es crear un programa en C# (Visual Studio 2012) que use el SDK de Canon y la libreria de vision artificial OpenCV (aqui como implementar a VS2012) para el control de la camara y el carril. en el futuro el carril tendra varios ejes en la bandeja de la muestra, he visto que se tarda mucho tiempo en preparar la posicion de algo tan pequeño. Tambien quiero incluir la iluminacion al aparato, pero no tengo mas pines libres, dejo solo el encendido y apagado de la iluminacion a 12V. De esto y de mover el carril se encargara arduino, enviando y recibiendo datos del y al programa.
La idea es ver a pantalla completa la imagen de la camara en LiveMode y los controles de pc, camara y carril a modo de marco o lateral o algo asi, teniendo asi todos los controles del proceso a mano.
Pense que disponia de una camara canon DLSR modelo 400D ( mi primera reflex ) para pruebas, pero despues de mucho sin uso esta muerta .. asi que para las pruebas uso la camara con la que trabajo ... mi amada canon 7D, mientras sea asi no voy a enredar mucho con la sdk y me voy a limitar a modificar el programa de ejemplo del tutorial que sigo, dejo un screensave de lo que llevo, poco mas que maximizar y eliminar los marcos, botones y demas, me faltan los controles de los 3 ejes de la muestra.


Creo que lo mas rapido es hacer un shield para arduino en vez de desarrollar una placa completa, la razon, no quiero soldar SMD, no se y tardaria, y el chip conversor FTDI lo es, usare alguno de los arduino originales que tengo por casa.
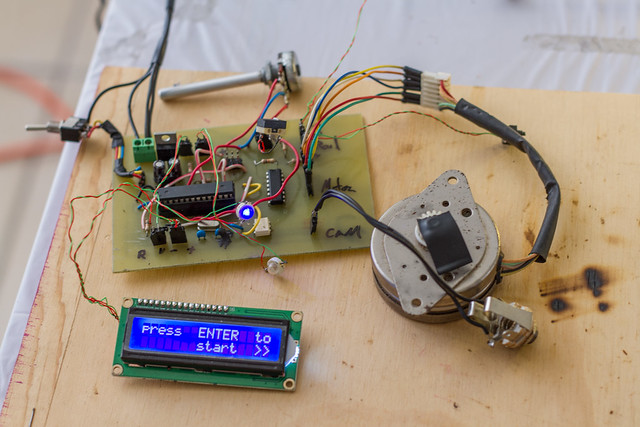
El shield controla 4 motores paso a paso bipolares (ULN2004), uno mueve la camara y los otros tres mueven la muestra en 3 ejes. Un 2n222 enciende o apaga la iluminacion y dos finales de carril limitan el movimiento del eje de la camara.
Dejo los archivos en Eagle del shield, aqui el brd y aqui el sch, aqui el pdf en A4.
Aqui el codigo arduino y aqui el codigo C# para VisualStudio2012. ( en cuanto los termine los subo )