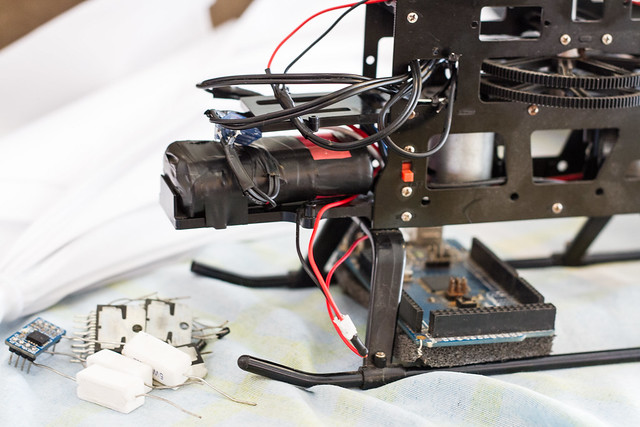
Por otros proyectos tengo detenido el quadcopter, pero tengo un helicoptero con motores DC de escobillas de aproximadamente medio metro de largo que va a suplir su carencia. El receptor y el mando con el emisor son algo chafas, 27mhz 2 canales. Perfecto para probar el arducopter o algun otro proyecto open source de control de vuelo.
Lo primero es controlar los motores que tengo, para eso volvere a usar los L298. en las pruebas en protoboard se calientan bastante, creo usare el chasis como disipador y espero sea suficiente para mantenerlos durante 10 minutos de vuelo a temperatura adecuada ( no tengo multimetro decente para medir el consumo de los motores, me toca esperar sean adecuados ). pense en ponerle motores brushless y ESC pero si hago eso ya directamente me monto el quadcopter, asi que motores con escobillas.


Estos son los archivos eagle de la pcb.
No hay comentarios:
Publicar un comentario